Das Multi Function Shield mit einem Drehgeber erweitern
Das Multi Function Shield, das ich ja bereits vorgestellt habe, bietet mit der Möglichkeit zur einfachen Anzeige von Daten auf seinem 4-fach-7-Segment-Display und den freien Anschlusspins eine gute Grundlage, Sensoren ausprobieren.Diesmal wollen wir das Multi Function Shield mit einem Drehgeber-Modul KY-040 erweitern.
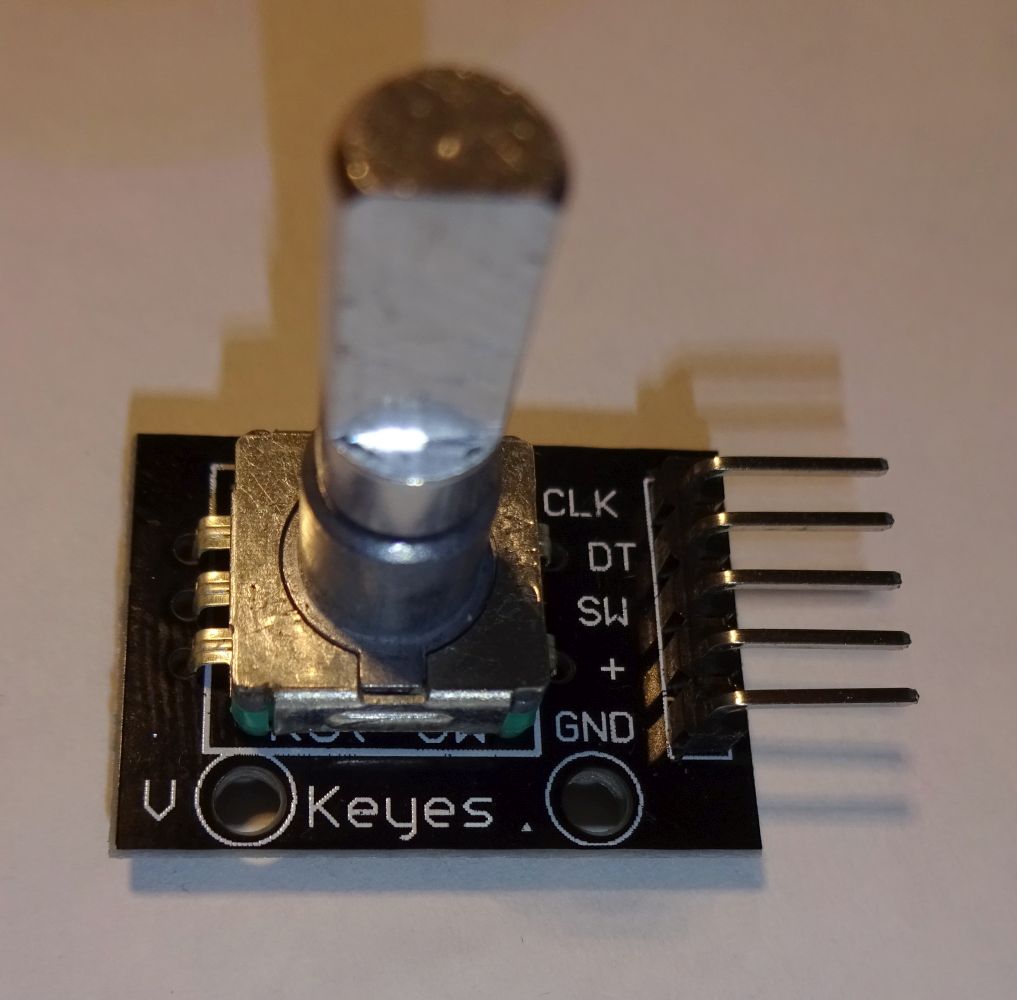
Drehgeber-Modul KY-040
Der Drehgeber sieht auf den ersten Blick aus wie ein Potentiometer, doch wenn man ihn dreht, fühlt man so eine Art Riffelung ähnlich wie bei einem Computer-Mausrad. Dadurch kann man einzelne Schritte fühlen und z. B. einen Wert genau einstellen.
Denn ein Drehgeber gibt nicht einen Widerstand wie ein Potentiometer zurück, sondern leitet über zwei digitale Leitungen die Drehimpulse weiter, die wir mit dem Arduino auswerten wollen.
Der Drehgeber verfügt über folgende Anschlüsse:
- CLK (Clock): Datenleitung 1
- DT (Data): Datenleitung 2
- SW (Switch): wird auf Masse zogen, wenn der Taster gedrückt wird
- +: zur Spannungsversorgung mit 5V
- GND: zum Anschluss an GND / Masse des Arduino

Damit passt er wunderbar in den 7-Pin-Header des Multi Function Shield, welches ja diese Belegung hat:
- 1: -
- 2: -
- 3: GPIO 0
- 4: GPIO 1
- 5: -
- 6: 5V
- 7: GND

Fehlt nur noch die Verdrahtung der Schalterleitung. Pin 5 des MFS-Headers ist ja nicht beschaltet. Also wollte ich einen freien Digital-Pin verwenden, musste aber feststellen, dass es keinen mehr gibt - die Macher des MFS haben nichts verschenkt. Darum habe ich mich entschlossen, den Drehgeber-Taster mit dem S1-Taster gleichzusetzen und ein entsprechendes Kabel gelötet. Wird jetzt der Drehgeber-Knopf gedrückt, ist es so als ob Schalter 1 betätigt wurde.
Wobei ich Schalter 1 den Vorzug geben würde, weil der nicht so windig in der Luft hängt. Legt man allerdings etwas in passender Höhe unter das Modul, dann lässt sich auch der eingebaute Taster ganz gut einhändig bedienen. Ich habe mir dafür extra einen kleinen Block designt und aus dem 3D-Drucker gelassen. So steht der Drehgeber fest auf der Tischoberfläche und lässt sich prima drücken, ohne das was wackelt.
Funktionsweise eines Drehgebers
Warum die beiden Datenleitungen Clock und Data heißen, erschließt sich mir nicht ganz. Man sollte sie eher links und rechts nennen.Grundsätzlich haben beide Leitungen den selben Wert, sind also beide auf HIGH oder LOW.
Wird der Encoder, so wird der Drehgeber auch genannt, um einen Schritt gedreht, dann springen beide auf den gegenteiligen Wert, also von HIGH auf LOW und von LOW auf HIGH. Durch die Anzahl der HIGH/LOW-Wechsel kann man also die Schritte zählen.
Doch durch den besonderen Aufbau des Encoders kann man auch die Richtung des Drehens heraus finden. Denn es gibt sozusagen Zwischenschritte. Bei einer Drehung nach rechts (also im Uhrzeigersinn) kippt zuerst der linke Wert um und dann der rechte - Eselsbrücke: die Veränderung wandert von links nach rechts, die Richtung, in die der Regler gedreht wird. Bei einer Linksdrehung verhält es sich umgekehrt: hier kippt zuerst der rechte Wert (Wanderung von rechts nach links).
Ich habe dazu ein kleines Video aufgenommen, da ein Bild (und erst recht ein Video) mehr zu sagen vermag als tausend Worte:
 für ein Youtube-Video anzuzeigen. Beachten Sie, dass dann (bisher noch nicht) eventuell (wenn nicht durch Adblocker oder ähnliches verhindert) Cookies von Youtube, Google und damit verbundenen Drittfirmen gesetzt werden, die ihr Gerät über weitere IFrames dieser Art nachverfolgen können und speichern, welche Videos mit Ihrem Gerät angeschaut wurden.")
Wer das selbst nachvollziehen möchte, hier ist der Source-Code für das gezeigte Programm:
////////////////////////////////////////////////////////
// (C) 2018 by Oliver Kuhlemann //
// Bei Verwendung freue ich mich über Namensnennung, //
// Quellenangabe und Verlinkung //
// Quelle: http://cool-web.de/arduino/ //
////////////////////////////////////////////////////////
#include %lt;TimerOne.h> // für Timings und Interrupts
#include %lt;MultiFuncShield.h> // API für das Multi Function Shield
#define PinDrehClock 0 // durch MFS-Header vorgegeben
#define PinDrehData 1 // durch MFS-Header vorgegeben
void setup() {
Timer1.initialize();
MFS.initialize(&Timer1); // initialize multi-function shield library
pinMode (PinDrehClock, INPUT);
pinMode (PinDrehData, INPUT);
}
void loop() {
byte clock;
byte data;
char st[5];
while (1) {
clock = digitalRead(PinDrehClock);
data = digitalRead(PinDrehData);
st[0]=clock+48;
st[1]=32;
st[2]=data+48;
st[3]=32;
st[4]='\0';
MFS.write(st);
delay(10);
}
}
Da der Header, an dem der Drehregler angeschlossen ist, genau die gleichen Pins verwendet wie die serielle Kommunikation zwischen Arduino und PC, nämlich D0 und D1 (bzw. RX und TX) ergibt sich ein kleines Problem: Befehle wie Serial.print... werden nicht richtig funktionieren und auch das Hochladen von neuen Scripts tut sich schwer.Darum bitte beachten, dass beim Hochladen der Drehgeber so eingestellt ist, dass die grüne RX-LED aus ist. Dann funktioniert das Hochladen. Ist sie hingegen an, schlägt das Hochladen fehl.
Programm zur Werteeinstellung
Hauptanwendungsgebiet eines solchen Drehgebers ist natürlich das Einstellen von Zahlen oder das Navigieren durch Menüs (der Taster dann entsprechend zur Auswahl), wobei es wichtig ist, dass Zahlen bzw. Menüpunkte genau ausgewählt werden können und nichts übersprungen wird.Das nachfolgende Beispielprogramm leistet das, indem es eine einstellbare Zahl anzeigt:
- Taster 1 (oder Drehgebertaste) stellt die Zahl wieder auf 0.
- Taster 2 subtrahiert 100 von der Zahl.
- Taster 3 addiert 100 zur Zahl.
- die LEDs 1 und 2 zeigen wie im vorhergehenden Beispiel den Zustand der CLK und DT-Leitungen, nur durch an und aus, an.
- der Drehgeber erhöht (rechts herum) oder erniedrigt (links herum) die Zahl in Einerschritten.
- ungültige Halbschritte werden erkannt und nicht als Drehung gewertet, der Drehgeber steht ja auch an der gleichen Stelle wie zuvor.
Und hier der passende Code dazu:
////////////////////////////////////////////////////////
// (C) 2018 by Oliver Kuhlemann //
// Bei Verwendung freue ich mich über Namensnennung, //
// Quellenangabe und Verlinkung //
// Quelle: http://cool-web.de/arduino/ //
////////////////////////////////////////////////////////
#include <TimerOne.h> // für Timings und Interrupts
#include <MultiFuncShield.h> // API für das Multi Function Shield
#define PinDrehClock 0 // durch MFS-Header vorgegeben
#define PinDrehData 1 // durch MFS-Header vorgegeben
void setup() {
Timer1.initialize();
MFS.initialize(&Timer1); // initialize multi-function shield library
pinMode (PinDrehClock, INPUT);
pinMode (PinDrehData, INPUT);
}
void loop() {
byte links = digitalRead(PinDrehClock);
byte rechts = digitalRead(PinDrehData);
byte linksBefore = links;
byte rechtsBefore = rechts;
int drehung = 0;
int position = 0;
int pause = 1;
while (1) {
// Buttons auswerten /////////////////////////////////////
byte btn = MFS.getButton();
if (btn == BUTTON_1_PRESSED) {
MFS.beep(1);
position = 0;
} else if (btn == BUTTON_2_PRESSED) {
MFS.beep(1);
position -= 100;
} else if (btn == BUTTON_3_PRESSED) {
MFS.beep(1);
position += 100;
}
// Drehgeber auswerten //////////////////////////////////
links = digitalRead(PinDrehClock);
rechts = digitalRead(PinDrehData);
MFS.writeLeds(LED_1, links);
MFS.writeLeds(LED_2, rechts);
if (links != linksBefore) { // rechtsdrehung
// warten, bis anderer Pin nachgezogen
while (digitalRead(PinDrehData) != digitalRead(PinDrehClock)) delay (pause);
if (digitalRead(PinDrehClock) != links) { // nach Halbschritt wieder zurück gedreht
drehung=0;
} else {
drehung = 1;
}
links = digitalRead(PinDrehClock);
rechts = digitalRead(PinDrehData);
linksBefore=links;
rechtsBefore=links;
} else if (rechts != rechtsBefore){ // linksdrehung
// warten, bis anderer Pin nachgezogen
while (digitalRead(PinDrehData) != digitalRead(PinDrehClock)) delay (pause);
drehung=0;
if (digitalRead(PinDrehData) != rechts) { // nach Halbschritt wieder zurück gedreht
drehung=0;
} else {
drehung = -1;
}
links = digitalRead(PinDrehClock);
rechts = digitalRead(PinDrehData);
linksBefore=rechts;
rechtsBefore=rechts;
} else {
drehung = 0;
}
position += drehung;
if (position < -999) {
position = -999;
MFS.beep (10);
} else if (position > 9999) {
position = 9999;
MFS.beep (10);
}
MFS.write(position);
delay(pause);
}
}
Untersetzer im 3D-Druck


Ich habe einen Untersetzer für das Drehgeber-Modul in OpenSCAD designt, in das man die Platine passgenau hineindrücken kann und das exakt die richtige Höhe hat, damit der Drehgeber plan aufliegt, wenn der Arduino Uno mit diesem Bumper ausgerüstet wurde.
Die .STL-Datei dazu kann hier heruntergeladen werden.
Damit lässt sich auch der Knopf gut niederdrücken, ohne dass man gegenhalten müsste.
Natürlich wird ein 3D-Drucker benötigt. Ich habe zum Beispiel einen günstigen Anycubic i3 Mega. Oder man kennt halt jemanden, der einen 3D-Drucker hat. Den kann man dann um einen Ausdruck bitten. Derjenige benötigt dann die hier herunterladbare .STL-Datei, die ihr ihm schicken solltet .Er weiß dann schon, was damit zu tun ist.
Am besten drückt ihr zuerst den Drehgeber richtig herum in den Block hinein und danach erst das Gesamtkonstrukt mit dem Header in die Header-Löcher auf dem Multi Function Shield. Achtet darauf, dass MFS und Block auf derselben geraden Tischoberfläche stehen. Dann nämlich kommt der Block auf genau der richtigen Höhe zum Halt, wenn alles plan ist, auch wenn die Headerpins vielleicht noch ein Zehntel-Millimeter weiter rein gingen.